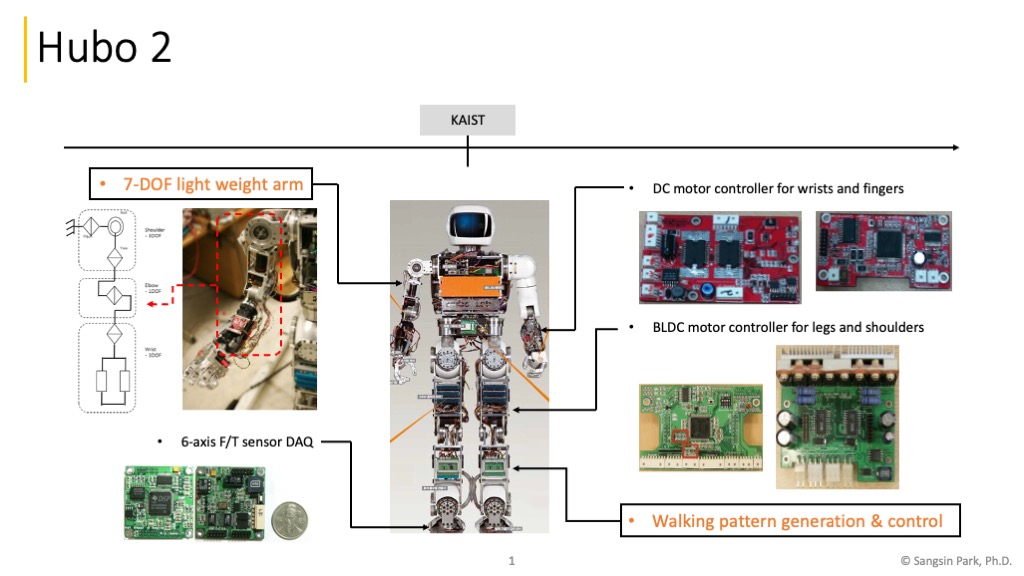
Development of Hubo2
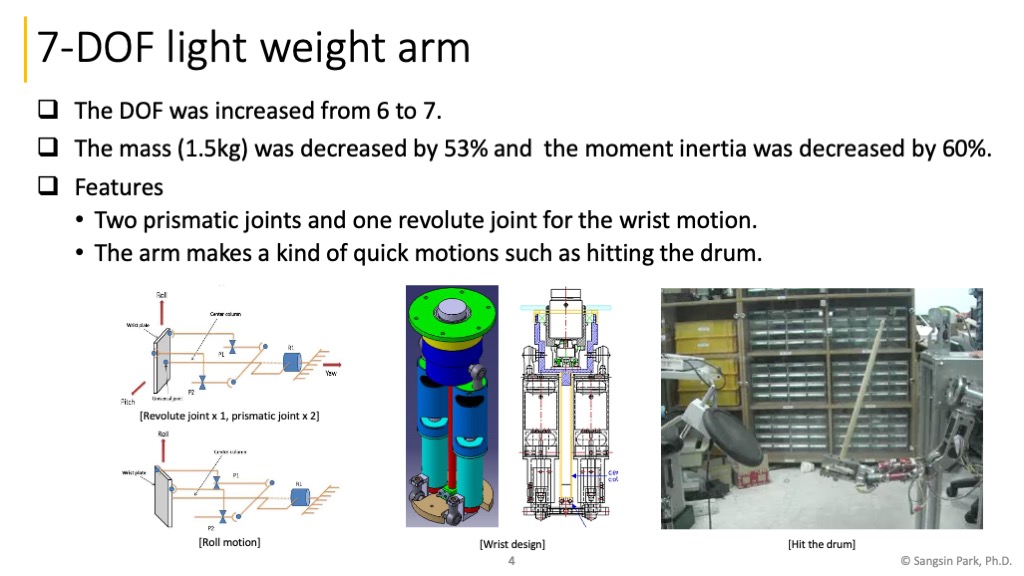
An example of the application; hitting the drum.
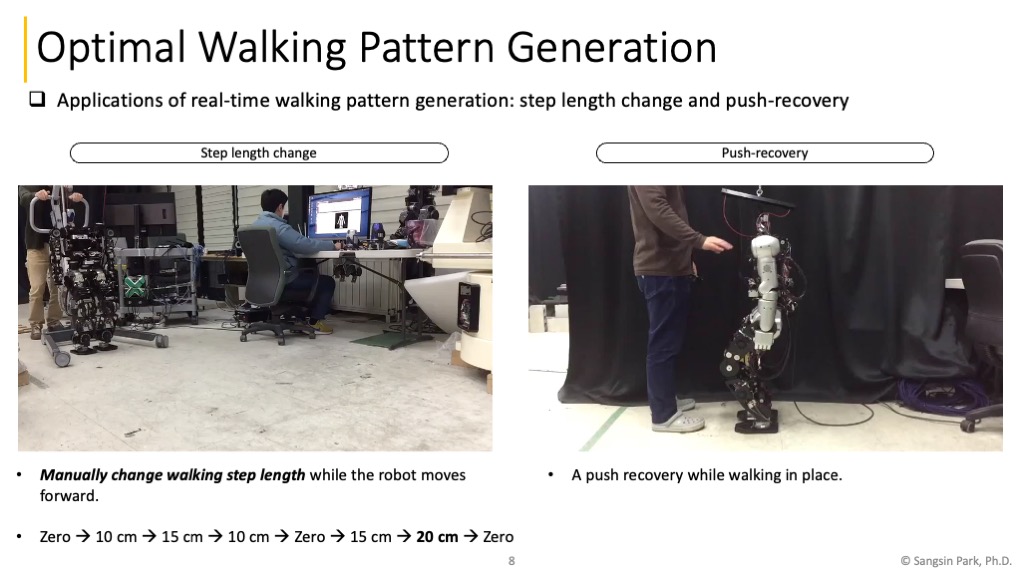
Manually change walking step length while the robot moves forward.
A push recovery while walking in place.
An example of the application; hitting the drum.
Manually change walking step length while the robot moves forward.
A push recovery while walking in place.