I’m developing a ball-balancing robot(BBR) for multi-purposes.
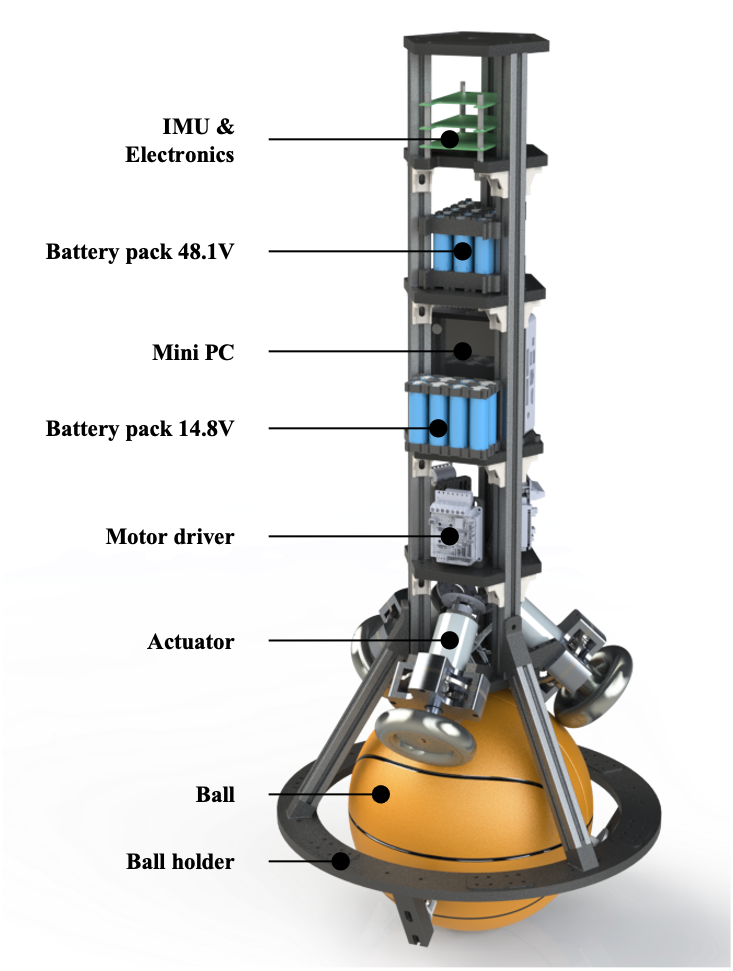

BBR Overview
– Mass: 8.9kg
– Height: 90cm
– Motor: Maxon EC-i 40 100W, 48V BLDC motor x 3
– Speed reducer: a customized stepped planetary gear, ratio 9.04:1
– Motor driver: ELMO G-SOLWHI20/100S x 3
– Communication: CAN 2.0
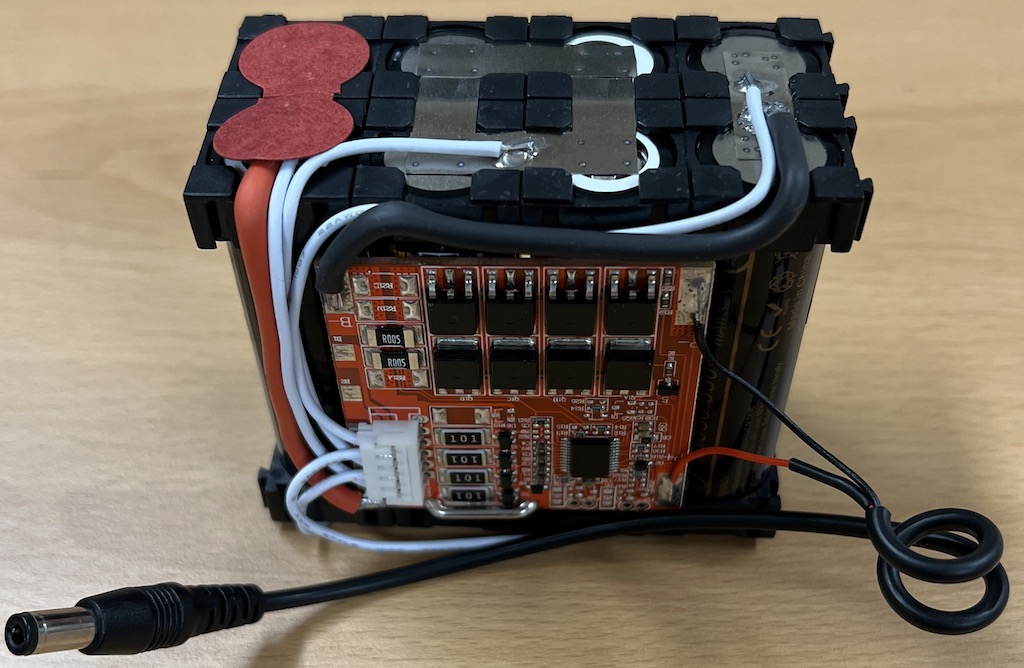
– Power supply: a 13S1P battery pack(48.1V) for motor drivers and an interface board, a 4S2P battery pack(14.8V) for a NUC PC
– IMU: 6-axis
– PC: NUC13ANKi3, 32GB RAM, 256GB SSD
– Real-time O/S: Ubuntu 20.04 patched with Xenomai
Actuator Design
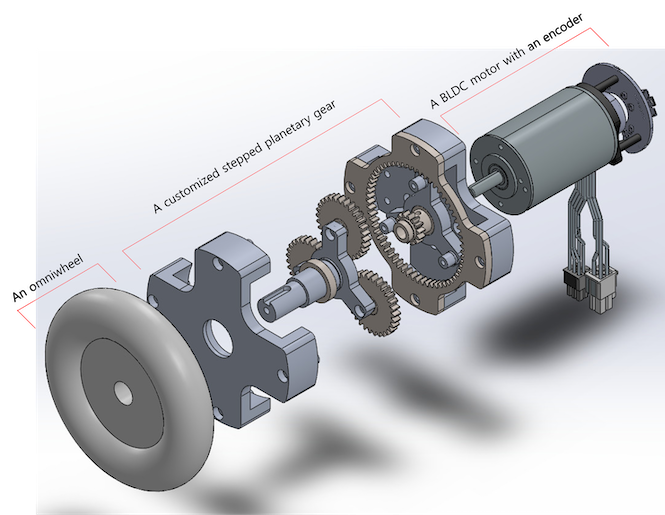
Each actuator consists of an omniwheel, a customized stepped planetary gear, a brushless DC (BLDC) motor, and a magnetic encoder.
Electrics Design
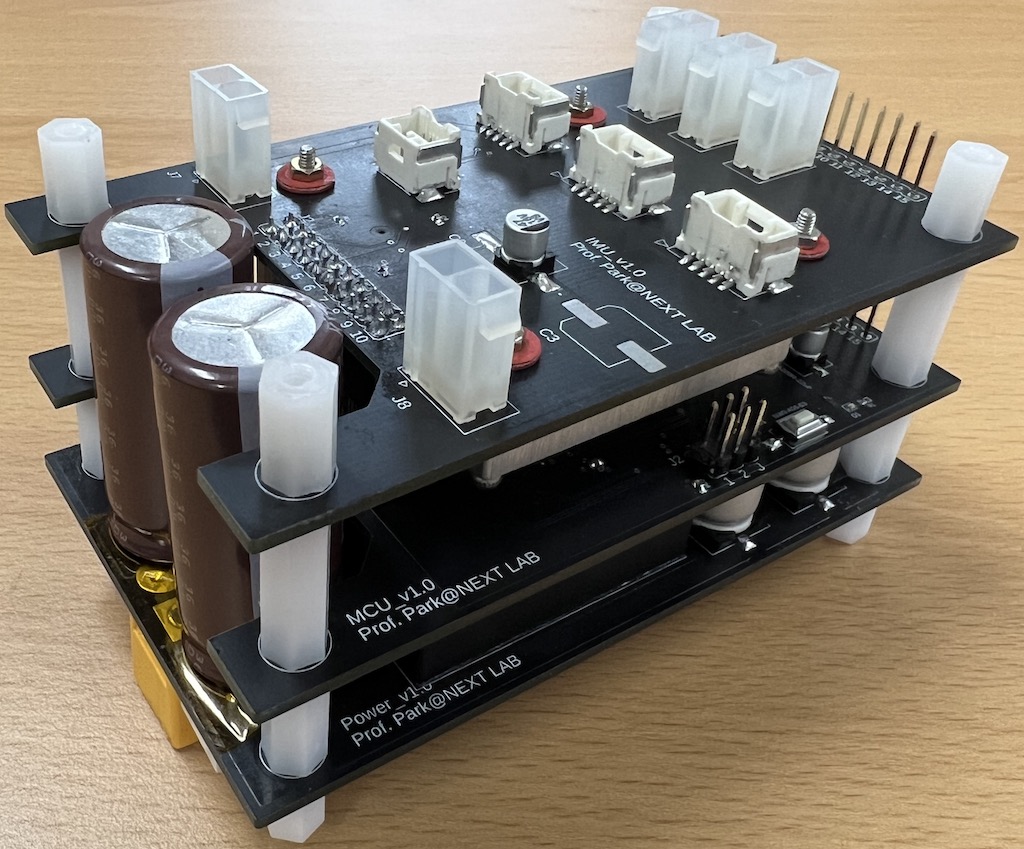
(1st layer: DC-DC converter PCB, 2nd layer: microcontroller PCB, 3rd layer: IMU and connectors PCB)
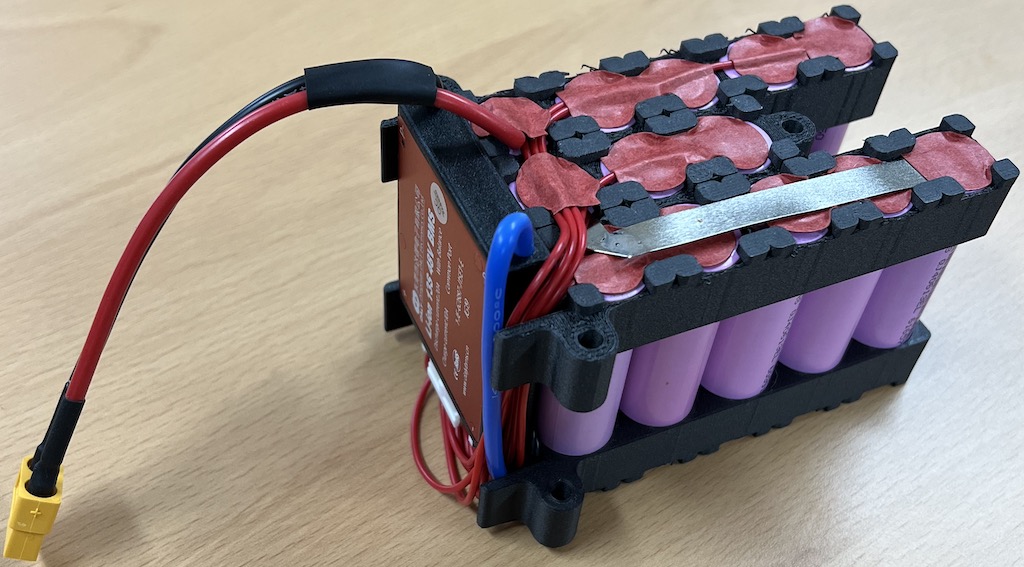
(rated 48.1V, charged 54.6V)
(rated 14.8V, charged 16.8V)